Self Balancing Table
Problem
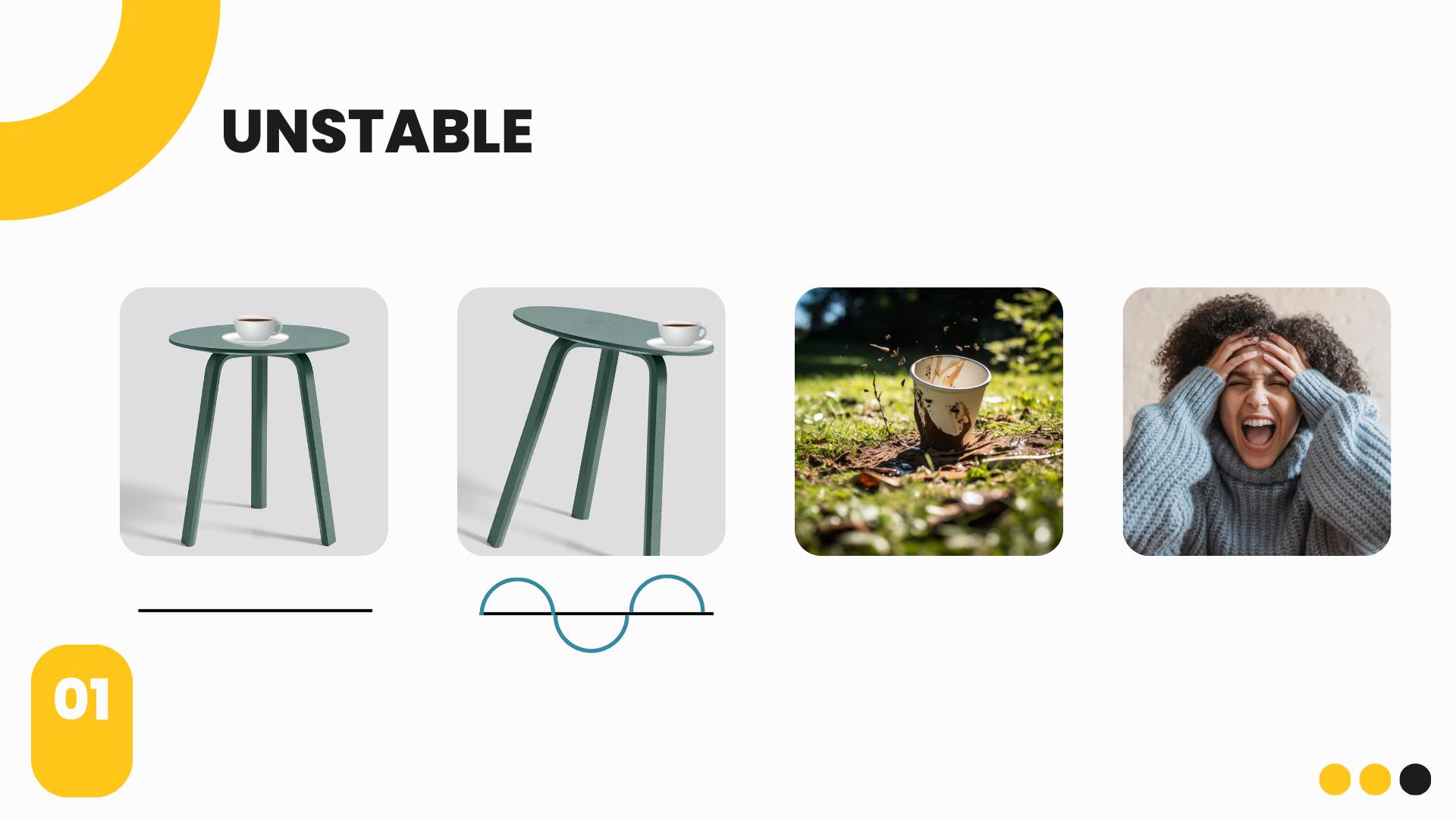
During the summer, as we engage in outdoor activities such as parties, sunbathing, and hiking, we often face the challenge of finding a stable surface for our food, coffee cups, and water glasses. Outdoor terrains are typically uneven, making it difficult to place a regular table without compromising its level surface. This issue persists during winter activities in snowy conditions, where placing a conventional table becomes impractical due to the risk of the legs getting stuck.
Solution and Benefits of the Self-Balancing Table:
Our solution addresses these challenges by introducing a self-balancing table that can adapt to any uneven surface. The table automatically stabilizes itself, ensuring a level surface regardless of the field’s irregularities. When transporting the table from one location to another, built-in sensors detect changes in the surface and adjust the height of the table legs accordingly, maintaining stability.
Components Used:
- Arduino UNO
- XYZ Accelerometer Sensor
- 360-Degree Rotation Servo Motor
- Voltage Divider
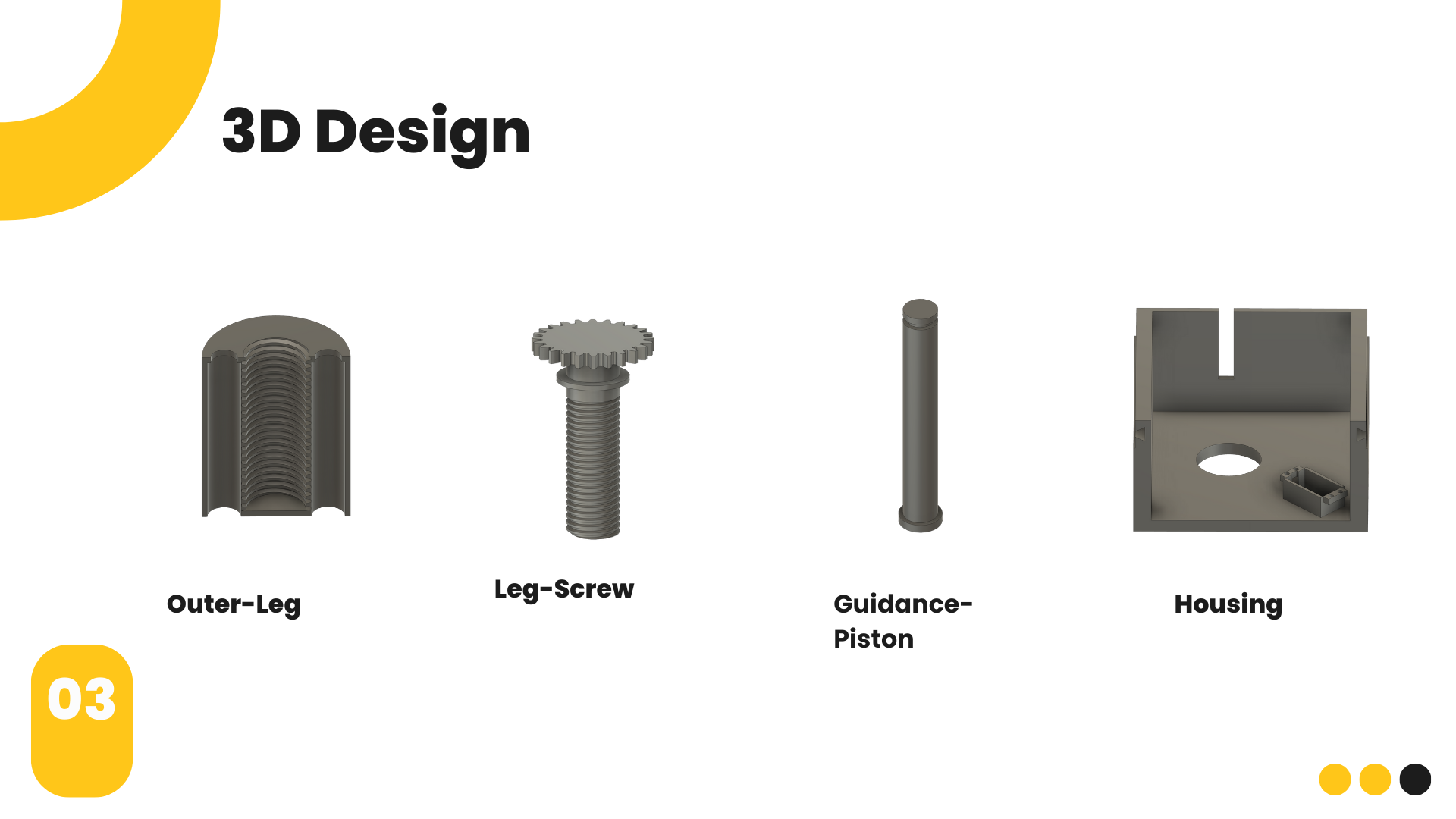
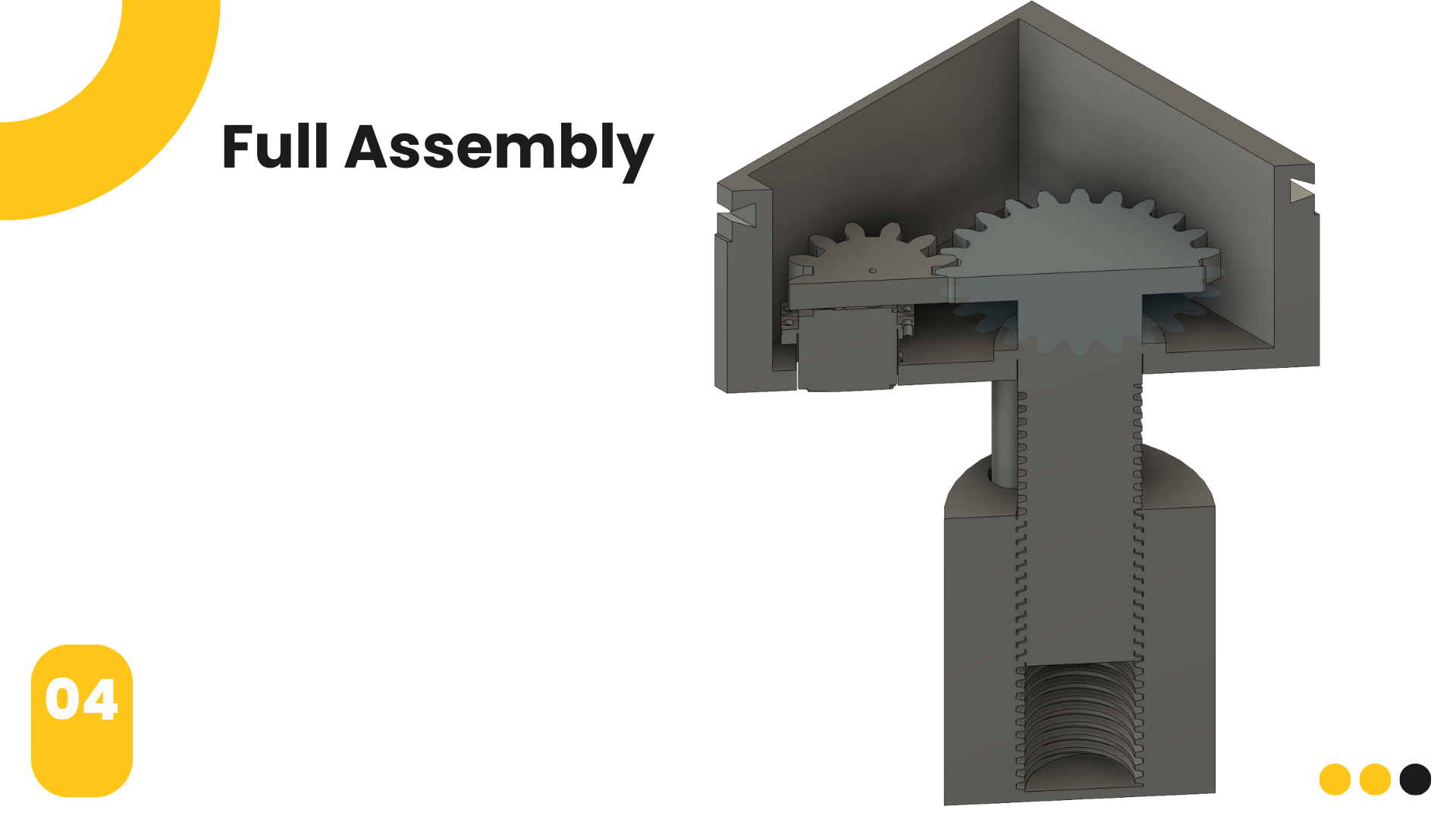
- 3D Printed Parts
- Plywood Plate
- Stabilization Algorithm/Coding
Slides

Final Output

Code for servo motor
Servo_Motor.ino
#include <Servo.h>
Servo myservo1;
Servo myservo2;
Servo myservo3;
int pos = 0;
void setup() {
myservo1.attach(9);
myservo2.attach(10);
myservo3.attach(11);
}
void loop() {
// Move forward for 8 seconds
for (int i = 0; i <= 180; i += 1) {
myservo1.write(i);
myservo2.write(i);
myservo3.write(i);
delay(44); // Adjust the delay for smoother motion
}
delay(8000); // Wait for 8 seconds
// Move backward for 10 seconds
for (int i = 180; i >= 0; i -= 1) {
myservo1.write(i);
myservo2.write(i);
myservo3.write(i);
delay(50); // Adjust the delay for smoother motion
}
delay(10000); // Wait for 10 seconds
}
Code for accelerometer sensor
Accelerometer_sensor.ino
#include <math.h>
const int x_out = A1; /* connect x_out of module to A1 of UNO board */
const int y_out = A2; /* connect y_out of module to A2 of UNO board */
const int z_out = A3; /* connect z_out of module to A3 of UNO board */
void setup() {
Serial.begin(9600);
}
void loop() {
int x_adc_value, y_adc_value, z_adc_value;
double x_g_value, y_g_value, z_g_value;
double roll, pitch, yaw;
x_adc_value = analogRead(x_out); /* Digital value of voltage on x_out pin */
y_adc_value = analogRead(y_out); /* Digital value of voltage on y_out pin */
z_adc_value = analogRead(z_out); /* Digital value of voltage on z_out pin */
Serial.print("x = ");
Serial.print(x_adc_value);
Serial.print("\t\t");
Serial.print("y = ");
Serial.print(y_adc_value);
Serial.print("\t\t");
Serial.print("z = ");
Serial.print(z_adc_value);
Serial.print("\t\t");
//delay(100);
x_g_value = ( ( ( (double)(x_adc_value * 5)/1024) - 1.65 ) / 0.330 ); /* Acceleration in x-direction in g units */
y_g_value = ( ( ( (double)(y_adc_value * 5)/1024) - 1.65 ) / 0.330 ); /* Acceleration in y-direction in g units */
z_g_value = ( ( ( (double)(z_adc_value * 5)/1024) - 1.80 ) / 0.330 ); /* Acceleration in z-direction in g units */
roll = ( ( (atan2(y_g_value,z_g_value) * 180) / 3.14 ) + 180 ); /* Formula for roll */
pitch = ( ( (atan2(z_g_value,x_g_value) * 180) / 3.14 ) + 180 ); /* Formula for pitch */
//yaw = ( ( (atan2(x_g_value,y_g_value) * 180) / 3.14 ) + 180 ); /* Formula for yaw */
/* Not possible to measure yaw using accelerometer. Gyroscope must be used if yaw is also required */
Serial.print("Roll = ");
Serial.print(roll);
Serial.print("\t");
Serial.print("Pitch = ");
Serial.print(pitch);
Serial.print("\n\n");
delay(1000);
}
Note
To run the code on Arduino IDE, you will need to install the library
Adafruit_Sensor,Servo-1.2.1andSparkFun_ADXL345_Arduino_Library. You will final the full repository on my github and also simulation video . I would like to extend my gratitude to my team members Sören Jost, Remon Chowdhurry, Farouk Akilu, and my friend Karri Anttila.